点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达VS code 插件配置手册
C/C++ Tools插件---C/C++支持安装库文件的配置GDB本地调试配置GDB远程调试配置Remote VSCode插件---远程编辑文件安装环境配置在本地端的配置在远程端的配置工作流Ftp Sync插件--—远程代码的同步安装环境配置工作流
C/C++ Tools插件---C/C++支持
此扩展的预览版本为C / C ++添加了对Visual Studio Code的语言支持,包括:
语言服务:
代码格式(clang格式)
自动补全
符号搜索
签名帮助
快速信息
转到定义/声明
查看定义/声明
类/方法导航
调试:
支持调试Windows、Linux和macOS应用程序
断点
变量查看
逐行代码调试
支持多线程调试
支持核心转储调试
安装
在VSCode的扩展插件中找到C/C++插件并进行安装;
Windows下想开发Linux代码需要安装Mingw开发工具
库文件的配置
打开项目到工作区,
按F1打开命令行,输入:
open settings json选择Preferences:Opem Settings (JSON),打开settings.json文件

在settings.json文件中添加:
/*****C/C++ Tools*****/
"C_Cpp.autocomplete": "Default",
"[cpp]": {"editor.quickSuggestions": true
},
"[c]": {"editor.quickSuggestions": true
},
"C_Cpp.default.cStandard": "c11",
"C_Cpp.default.cppStandard": "c++11",
/*****C/C++ Tools*****/按F1打开命令行,输入:
edit configuration json选择C/C++:Edit configurations (JSON),打开c_cpp_properties.json文件

在settings.json文件中添加:
{"configurations": [{"name": "system", //系统类型"includePath": [ //头文件目录,**表示匹配目录文件及子目录"${workspaceFolder}/**"],"defines": [],"compilerPath": "path", //编译器地址"intelliSenseMode": "mode" //编译器类型 "cStandard": "c11","cppStandard": "c++11"}],"version": 4
}如:
Windows :
{"configurations": [{"name": "Win32", "includePath": [ "${workspaceFolder}/**","C:/opencv/build/include/opencv2/**"],"defines": ["_DEBUG","UNICODE","_UNICODE"],"intelliSenseMode": "msvc-x64","cStandard": "c11","cppStandard": "c++11"}],"version": 4
}Linux:
{"configurations": [{"name": "Linux", "includePath": [ "${workspaceFolder}/**"],"defines": [],"compilerPath": "/usr/bin/gcc","intelliSenseMode": "clang-x64","cStandard": "c11","cppStandard": "c++11"}],"version": 4
}GDB本地调试配置
打开项目到工作区,
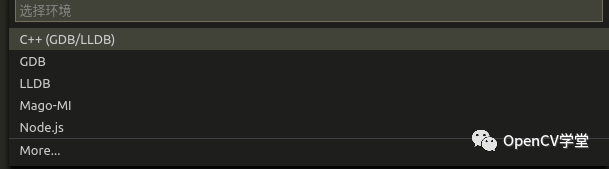
打开侧栏的“调试”界面->点击“设置”按钮,选择C++(GDB/LLDB)选项:

打开launch.json文件,在文件中添加:
{// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(gdb) Launch", // 配置名称,将会在启动配置的下拉菜单中显示"type": "cppdbg", // 配置类型,不需修改 "request": "launch", // 请求配置类型,可以为launch(启动)或attach(附加) "program": "${workspaceFolder}/bin文件", // 将要进行调试的程序的路径 "args": [], // 程序调试时传递给程序的命令行参数,["arg1", "arg2]. "stopAtEntry": false, // 设为true时程序将暂停在程序入口处,一般设置为false "cwd": "${workspaceFolder}", // 程序调试程序时要搜索的代码的目录"additionalSOLibSearchPath": "path" // 程序调试程序时要搜索的.so文件的目录(选填)"environment": [], // 针对调试的程序,要添加到环境中的环境变量(选填)"externalConsole": true, // 调试时是否显示控制台窗口,一般设置为true显示控制台 "MIMode": "gdb", // VSCode要使用的调试工具,必须设置为gdb或lldb"miDebuggerPath": "path", // VSCode要使用的调试工具路径(需要绝对路径)"preLaunchTask": "g++", // 调试开始前执行的任务,需要配置tasks.json文件(选填)"setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}如:
Windows:
{"version": "0.2.0","configurations": [{"name": "(gdb) Launch", "type": "cppdbg", "request": "launch","program":"${workspaceRoot}/bin/pthread.exe", "args": [], "stopAtEntry": false, "cwd": "${workspaceFolder}", "externalConsole": true,"MIMode": "gdb","miDebuggerPath": "C:\\MinGw\\bin\\gdb.exe""setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}Linux:
{"version": "0.2.0","configurations": [{"name": "(gdb local) L", "type": "cppdbg", "request": "launch", "program": "${workspaceFolder}/bin/pthread", "args": [], "stopAtEntry": false, "cwd": "${workspaceFolder}", "externalConsole": true, "MIMode": "gdb", "setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}打开侧栏的“调试”界面->点击“开始调试”按钮,开始调试

GDB远程调试配置
打开项目到工作区,
打开侧栏的“调试”界面->点击“设置”按钮,选择C++(GDB/LLDB)选项:

打开launch.json文件,在文件中添加:
{// 使用 IntelliSense 了解相关属性。 // 悬停以查看现有属性的描述。// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387"version": "0.2.0","configurations": [{"name": "(gdb) Launch", // 配置名称,将会在启动配置的下拉菜单中显示"type": "cppdbg", // 配置类型,不需修改 "request": "launch", // 请求配置类型,可以为launch(启动)或attach(附加) "program": "${workspaceFolder}/bin文件", // 将要进行调试的程序的路径 "args": [], // 程序调试时传递给程序的命令行参数,["arg1", "arg2]. "stopAtEntry": false, // 设为true时程序将暂停在程序入口处,一般设置为false "cwd": "${workspaceFolder}", // 程序调试程序时的代码所在的目录"additionalSOLibSearchPath": "path",// 程序调试程序时要搜索的.so文件的目录(选填)"environment": [], // 针对调试的程序,要添加到环境中的环境变量(选填)"externalConsole": true, // 调试时是否显示控制台窗口,一般设置为true显示控制台 "MIMode": "gdb", // VSCode要使用的调试工具,必须设置为gdb或lldb"miDebuggerPath": "path", // VSCode要使用的调试工具路径(需要绝对路径)/**********与本地调试不同的地方**********/"miDebuggerServerAddress": "addr:port", // 要远程调试的地址,IP地址:端口号"debugServerArgs": "args", // 调试器服务器的参数 /**********与本地调试不同的地方**********/"preLaunchTask": "g++", // 调试开始前执行的任务,需要配置tasks.json文件(选填)"setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}如:
Linux:
{"version": "0.2.0","configurations": [{"name": "(gdb server) L","type": "cppdbg","request": "launch","program": "${workspaceFolder}/bin/pthread","args": [],"stopAtEntry": false,"cwd": "${workspaceFolder}","externalConsole": true,"MIMode": "gdb",/**********与本地调试不同的地方**********/"miDebuggerServerAddress": "192.168.0.100:2333","debugServerArgs": "",/**********与本地调试不同的地方**********/"setupCommands": [{"description": "Enable pretty-printing for gdb","text": "-enable-pretty-printing","ignoreFailures": true}]}]
}先远程端:
打开一个新终端,运行gdbserver打开要调试的程序:
gdbserver localhost:port bin文件路径(与launch.json文件配置路径相同)如:
gdbserver localhost:2333 ./bin/pthread若想关闭gdbserver,需要在远程打开新终端,输入:
killall gdbserver再在本地端:
打开侧栏的“调试”界面->点击“开始调试”按钮,开始调试
Remote VSCode插件---远程编辑文件
此扩展允许您轻松地获取并编辑远端文件,而不是使用命令行和 vi 编辑远端文件这种原始的操作。
安装
在VSCode的扩展插件中找到Remote VSCode插件并进行安装;
环境配置
在本地端的配置
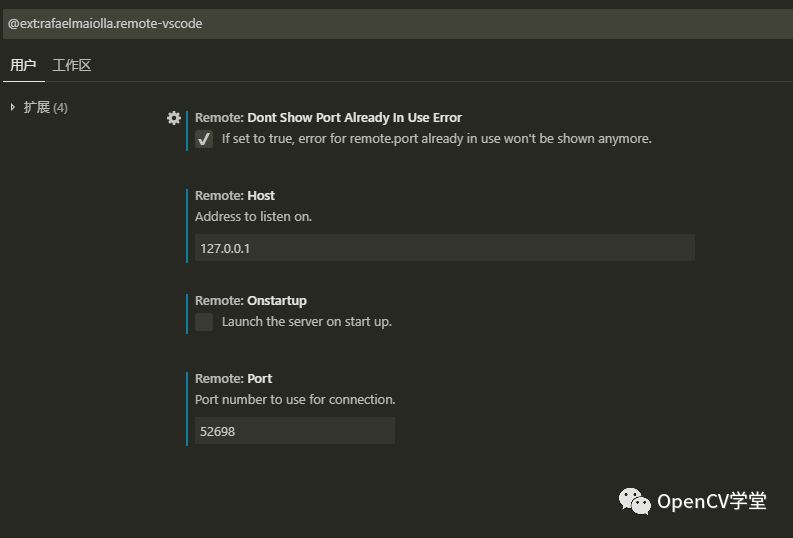
右键点击“Remote VSCode插件”->“配置扩展设置”,在设置页面设置相应参数:
Remote:Host(本地IP地址)设置为:127.0.0.1
Remote:Port(本地通信端口)设置为:52698
Remote:Onstartup(插件自启动)设置为:false
Remote:Dont Show Port Already In Use Error(端口正在使用时不报错)设置为:false
或者,按F1打开命令行,输入:
open settings json选择Preferences:Opem Settings (JSON),打开settings.json文件

在settings.json文件中添加:
/*****Remote VSCode*****/
"remote.host": "127.0.0.1",
"remote.port": 52698,
"remote.onstartup": false,
"remote.dontShowPortAlreadyInUseError": false,
/*****Remote VSCode*****/在远程端的配置
远程Linux安装 rmate:
wget https://raw.githubusercontent.com/sclukey/rmate-python/master/bin/rmatechmod +x ./rmatemv ./rmate /usr/local/bin/rmate工作流
启动插件
按F1打开命令行,输入:
remote:start server选择Remote:Start Server,开启插件

附件:
使用命令行:
remote:start server :开启插件
remote:stop server :关闭插件
连接远程系统,传输编辑文件:
本地:
打开上方工具栏”终端”->“新建终点”,或按ctrl + shift + `快捷键,打开PowerShell终端:
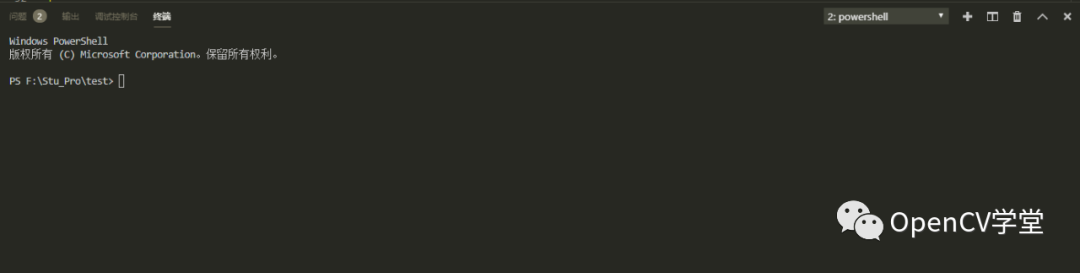
在终端窗口中输入:
ssh -R 52698:127.0.0.1:52698 远端用户名@远端地址如:
ssh -R 52698:127.0.0.1:52698 linux@192.168.0.111之后输入密码ssh连接远程Linux系统即可。
远端:
在远端终端中输入:
rmate -p 52698 打开要编辑的文件如:
rmate -p 52698 ./main.cppFtp Sync插件--—远程代码的同步
此扩展允许您轻松地将项目文件 通过FTP与远端同步。
安装
在VSCode的扩展插件中找到Ftp-Sync插件并进行安装;
环境配置
新建一个目录,并打开到工作区
按F1打开命令行,输入:
ftp-sync选择Ftp-sync: Init ,新建并打开ftp-sync.json文件,初始化配置
在ftp-sync.json文件中配置:
{"remotePath": "path", //要传输的文件的远端站点的目录"host": "host", //远端地址"username": "username", //远端用户名"password": "password", //远端密码"protocol": "sftp", //sftp协议,默认值为ftp协议"port": 22, //ftp默认端口是21,sftp的默认端口是22"uploadOnSave": false, //是否应该自动保存上传文件,默认值为false"secure": false, //安全设置,默认值为false"ignore": [ //忽略上传路径"\\.vscode","\\.git","\\.DS_Store"],"passive": false,"debug": false,"privateKeyPath": null,"passphrase": null,"agent": null,"allow": [],"generatedFiles": {"extensionsToInclude": [""],"path": ""}
}如:
{"remotePath": "/home/linux/pro/", "host": "192.168.0.111", "username": "linux", "password": "123456", "protocol": "sftp", "port": 22, "uploadOnSave": false, "secure": false, "ignore": [ "\\.vscode","\\.git","\\.DS_Store"],"passive": false,"debug": false,"privateKeyPath": null,"passphrase": null,"agent": null,"allow": [],"generatedFiles": {"extensionsToInclude": [""],"path": ""}
}工作流
使用命令行:
Ftp-sync: Sync Local to Remote : 本地同步到远程
Ftp-sync: Sync Remote to Local : 远程同步到本地
Ftp-sync: Commit : 提交修改
下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~