点击上方“小白学视觉”,选择加"星标"或“置顶”
重磅干货,第一时间送达上节我们提到无论是结构光、TOF还是双目立体成像方案,主要的硬件包括红外光发射器、红外光摄像头、可见光摄像头和图像处理芯片四部分,红外摄像头需要特制的窄带滤色片,另外结构光方案还需要在发射端添加光学棱镜与光栅,双目立体成像多一颗红外光摄像头。要了解他们涉及的工艺,首先就要对每一部分的功能和构成做深入了解。我们以结构光为例,对每一部分的构成进行拆解。
1 红外发射器
红外光发射部分是整个3D视觉重要的组件之一,用于发射经过特殊调制的不可见红外光至拍摄物体,其发射图像的质量对整个识别效果至关重要。采用结构光方案的 3D 视觉相比于 TOF 方案要复杂得多,主要是结构光方案需要采用 pattern 图像(如激光散斑等)进行空间标识,因此需要定制的 DOE(衍射光栅)和 WLO(晶圆级光学透镜,包括扩束元件、准直元件、投射透镜等)。但实际上WLO要视情况而定,在我从事的VCSEL项目中,就只有准直Lens,没有扩束元件和投射透镜。
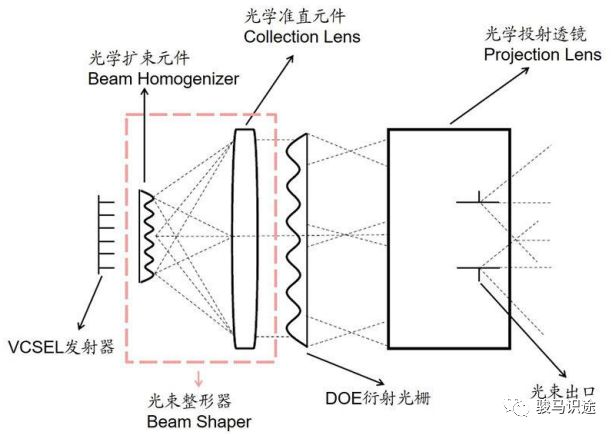
整个不可见光红外线(IR)发射模组的工作流程主要为:
1)不可见红外光发射源(激光器或者LED)发射出不可见红外光;
2)不可见红外光通过准直镜头进行校准;
3)校准后的不可见红外光通过光学衍射元件(DOE)进行散射,进而得到所需的散斑图案。因为散斑图案发射角度有限,所以需要光栅将散斑图案进行衍射“复制”后,扩大其投射角度。因此IR发射模组主要部件包括:不可见红外光发射源(激光器或者LED)、准直镜头(WLO)、光学衍射元件(DOE)。
1.1 近红外光源选择,VCSEL是最佳方案
目前,可以提供 800-1000nm 波段的近红外光源主要有三种:红外LED、红外LD-EEL(边发射激光二极管)和VCSEL(垂直腔面发射激光器)。
VCSEL 可以说是红外激光LD的一种,全名为垂直共振腔表面放射激光器,顾名思义,它采用垂直发射模式,与其他红外LD的边发射模式不同。VCSEL的垂直结构更加适合进行晶圆级制造和封测,规模量产之后的成本相比于边发射LD有优势,可靠性高,没有传统的激光器结构如暗线缺陷的失效模式。相比于LED,VCSEL的光谱质量高,中心波长温漂小,响应速度快,优势明显。
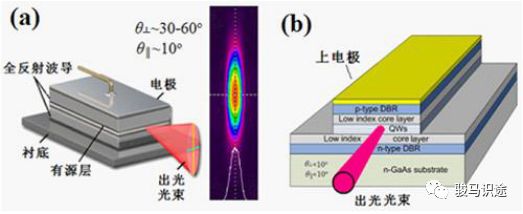
边发射EEL激光二极管LD结构图
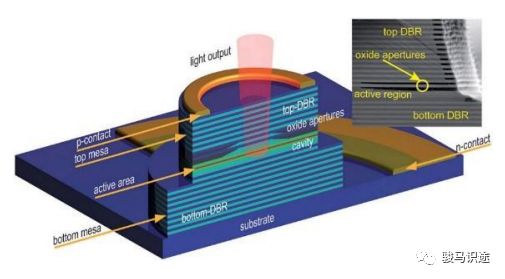
垂直发射模式VCSEL结构图
三种主流近红外光发射光源优劣对比:
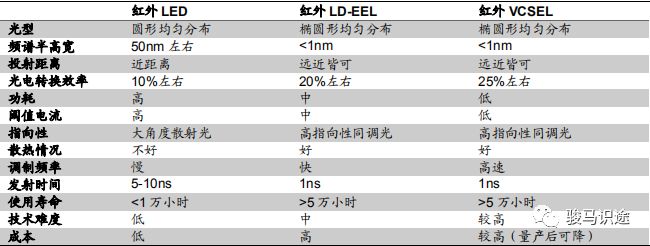
综合分析三种方案,LED 虽然成本低,但是发射光角度大,必须输出更多的功率以克服损失。此外,LED 不能快速调制,限制了分辨率,需要增加闪光持续时间;边发射LD 也是手势识别的可选方案(如DFB),但是输出功率固定,边缘发射的模式在制造工艺方面兼容性不好;VCSEL 比 LD-EEL 的优势在于所需的驱动电压和电流小,功耗低,光源可调变频率更高(可达数 GHz),与化合物半导体工艺兼容,适合大规模集成制造。尤其是 VCSEL 功耗低、可调频率高、垂直发射的优点,使其比 LD-EEL 更加适合消费电子智能终端。
1.2 晶圆级光学元件WLO是核心组件
WLO 晶圆级光学器件,是指晶元级镜头制造技术和工艺。与传统光学器件的加工技术不同,WLO 工艺在整片玻璃晶元上,用半导体工艺批量复制加工镜头,多个镜头晶元压合在一起,然后切割成单颗镜头,具有尺寸小、高度低、一致性好等特点。光学透镜间的位置精度达到 nm 级。
传统光学镜头与晶圆级镜头对比
在 3D 视觉发射端结构复杂的情况下,光学器件采用 WLO 工艺,可以有效缩减体积空间,同时器件的一致性好,光束质量高,采用半导体工艺在大规模量产之后具有成本优势,是未来标准化的光学透镜组合的最佳选择。
由于WLO 工艺由于是采用半导体工艺和设计思路进行光学器件的制造,因此整个流程更加复杂,无论是设计流程还是加工环节,都需要更加先进的设计思路和更加精细的加工处理。
1.3 DOE对于结构光方案至关重要
在3D视觉结构光方案中,经过准直镜头校准后的激光束并没有特征信息,必须采用特定的 pattern 光学图案(如激光散斑等)实现深度信息的测量,因此下一步需要对激光束进行调制,使其具备特征结构,光学衍射元件(DOE)就是用来完成这一任务的。
VCSEL射出的激光束经准直后,通过DOE进行散射,即可得到所需的散斑图案。由于DOE对于光束进行散射的角度(FOV)有限,所以需要光栅将散斑图案进行衍射“复制”后,扩大其投射角度。
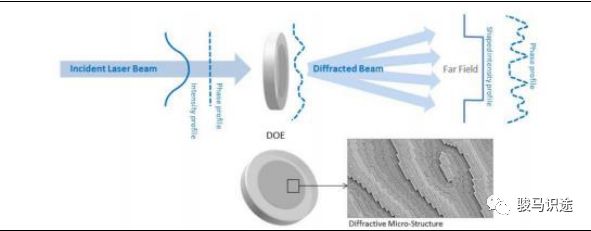
DOE 衍射光学元件(Diffractive Optical Elements)是基于光的衍射原理,利用计算机辅助设计,并通过半导体芯片制造工艺,在基片上(或传统光学器件表面)刻蚀产生台阶型或连续浮雕结构(一般为光栅结构),形成同轴再现、且具有极高衍射效率的一类光学元件。通过不同的设计来控制光束的发散角和形成光斑的形貌,实现光束形成特定图案的功能。
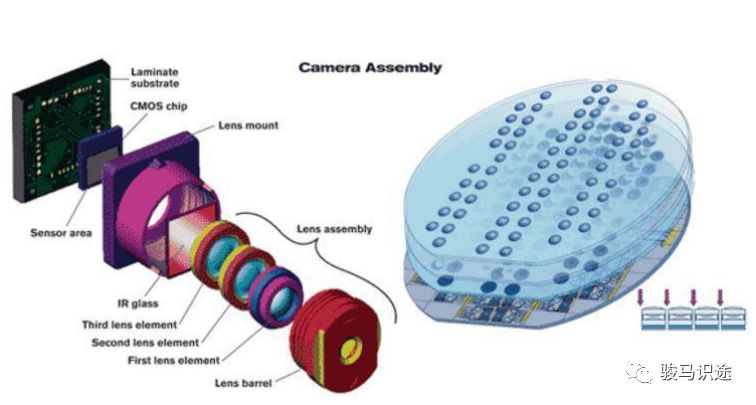
2 不可见光红外线(IR)接收模组
在3D结构光方案中,RX红外接收部分主要为一颗红外摄像头,用于接收被物体反射的红外光,采集空间信息。该红外摄像头主要包括三部分:红外CMOS传感器、光学镜头、红外窄带干涉滤色片。
在基本结构上与目前主流的可见光摄像头类似,但是在具体的零部件方面存在差异:
1)可见光CMOS传感器需要识别RGB三色,对分辨率的要求高,红外CMOS只需要识别近红外光,分辨率要求不高;
2)可见光摄像头需要红外截止滤色片将红外光截止掉,只通过可见光,而红外摄像头只通过特定波段的近红外光,而将可见光截止掉,因此需要窄带滤色片;
3)由于可见光摄像头对图像分辨率要求高,因此光学镜头的设计非常复杂,红外摄像头对光学镜头的要求不高。
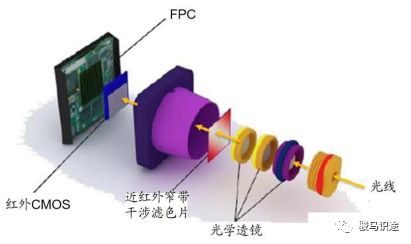
红外摄像头主要结构
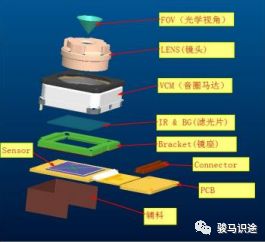
典型可见光摄像头基本构成
2.1 特制红外CMOS
在 3D 视觉方案中,红外 CMOS的要求是其能接受被拍摄物体发射回来的红外散斑图案,不需要对其他波长的光线进行成像。
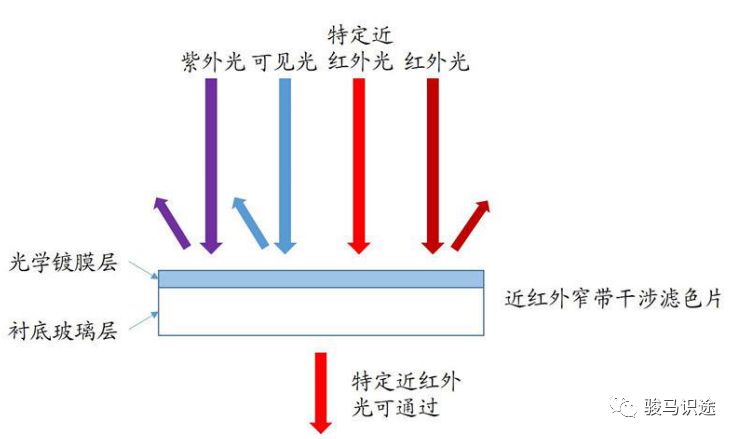
2.2窄带滤光片
在IR发送端,VCSEL发射的是940nm波长的红外光,因此在接受端需要将940nm以外的环境光剔除,让接受端的特制红外CMOS只接收到940nm的红外光。为达到这一目的,需要用到窄带滤光片。
所谓窄带滤光片,就是在特定的波段允许光信号通过,而偏离这个波段以外的两侧光信号被阻止。窄带滤光片主要采用干涉原理,需要几十层光学镀膜构成,相比普通的RGB吸收型滤光片具有更高的技术难度和产品价格。这个镜片在国内,很大部分由水晶光电提供。
2.3 接收端镜头(Lens)
接收端镜头为普通镜头,业内方案成熟,各个厂商都能提供。
总体而言,接收端除窄带滤波片较特殊,制造难度较高外,特制红外CMOS和镜头都是成熟产品,不存在制造难度。
3 可见光摄像头
可见光镜头模组,采用普通镜头模组,用于2D彩色图片拍摄,非新增业务。
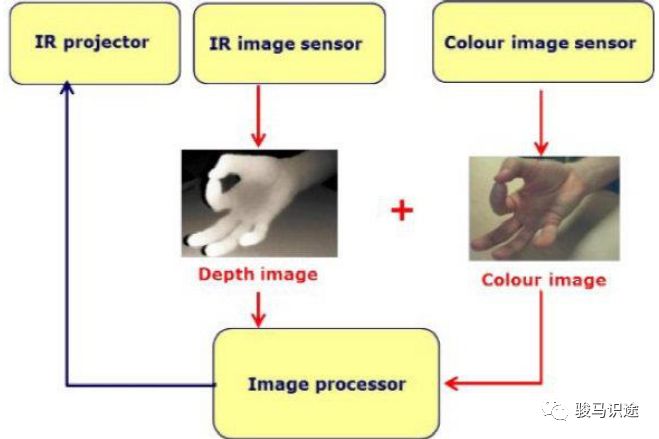
在 3D 视觉体系中,无论是结构光方案,还是 TOF 方案,红外光线的作用都是采集深度 Z 轴信息,从而确定物体的景深信息,而物体的平面 XY 轴信息需要借助普通可见光摄像头进行采集。
红外摄像头和可见光摄像头共同实现三维图像
4 图像处理芯片
图像处理芯片,将普通镜头模组拍摄的2D彩色图片和IR接收模组获取的3D信息集合,通过复杂的算法将IR接收端采集的空间信息和镜头成像端采集的色彩信息相结合,生成具备空间信息的三维图像。
该芯片设计壁垒高,尤其是算法层面的要求较高,需要根据3D视觉方案处理深度信息,目前仅有少数几家公司拥有该技术。
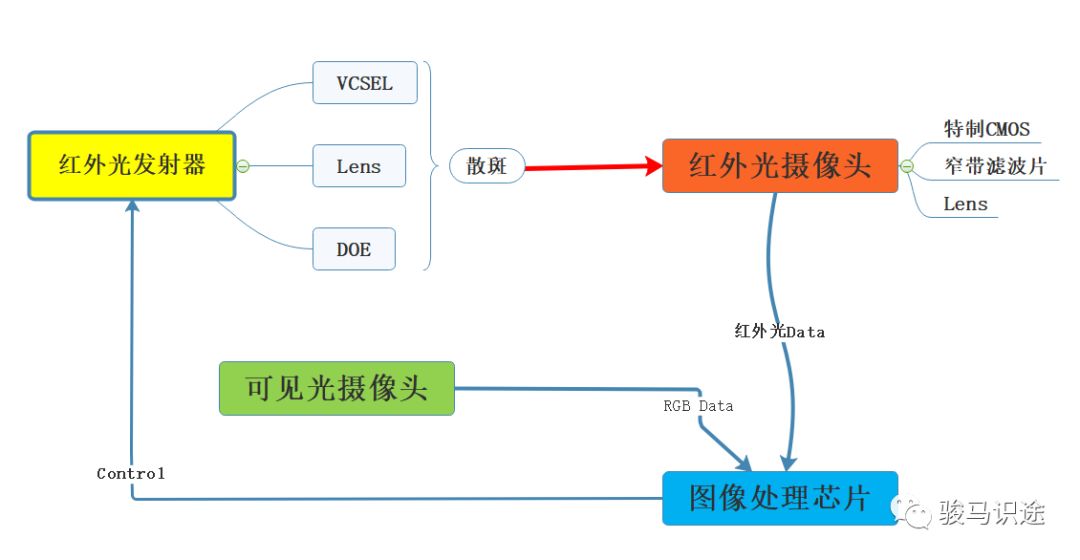
好了,3D成像技术的硬件构成我们全部拆解清楚了,总结成下图,有了这个基础,再找其供应商就是对号入座的事情了,想知道独家供应链的宝典吗?下期我会将行业现状和项目应用到的供应商整理好,倾囊相授。更多精彩请扫下方二维码持续关注!
小白团队出品:零基础精通语义分割↓↓↓

下载1:OpenCV-Contrib扩展模块中文版教程
在「小白学视觉」公众号后台回复:扩展模块中文教程,即可下载全网第一份OpenCV扩展模块教程中文版,涵盖扩展模块安装、SFM算法、立体视觉、目标跟踪、生物视觉、超分辨率处理等二十多章内容。
下载2:Python视觉实战项目52讲
在「小白学视觉」公众号后台回复:Python视觉实战项目,即可下载包括图像分割、口罩检测、车道线检测、车辆计数、添加眼线、车牌识别、字符识别、情绪检测、文本内容提取、面部识别等31个视觉实战项目,助力快速学校计算机视觉。
下载3:OpenCV实战项目20讲
在「小白学视觉」公众号后台回复:OpenCV实战项目20讲,即可下载含有20个基于OpenCV实现20个实战项目,实现OpenCV学习进阶。
交流群
欢迎加入公众号读者群一起和同行交流,目前有SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、算法竞赛等微信群(以后会逐渐细分),请扫描下面微信号加群,备注:”昵称+学校/公司+研究方向“,例如:”张三 + 上海交大 + 视觉SLAM“。请按照格式备注,否则不予通过。添加成功后会根据研究方向邀请进入相关微信群。请勿在群内发送广告,否则会请出群,谢谢理解~






