
为什么需要高精地图
理论上来讲,可以在车载系统检测和获取所有道路信息(可行驶路径、车道优先级、红绿灯与车道的关联关系、车道与人行横道与红绿灯的关系等),但是目前的AI能力无法保证实现很高的MTBF(Mean Time Between Failures, 平均无故障时间),所以需要提前把这些信息都准备好。
高精地图的挑战
规模化-Scale
如果自动驾驶车辆只在一个区域、一个城市、或者几个城市运营,那就不存在规模化的问题。但是2025年之后,自动驾驶会在消费者层面全面落地,用户需要驾车到任意想去的地方,在这种场景下,Scale是一个无法规避的问题。
鲜度-Fresh
理想情况下,地图是在实时更新的。当物理环境发生变化时,需要实时反映到地图上。月级更新、甚至天级更新都是不够的,我们需要做到分钟级,甚至更短。
精度-Accuracy
车载系统(OnBoard System)检测的车辆和行人需要与高精地图(High Definiation Map)实现厘米级精度的匹配,因此地图的精度至关重要。
通用高精地图制作方法的缺陷
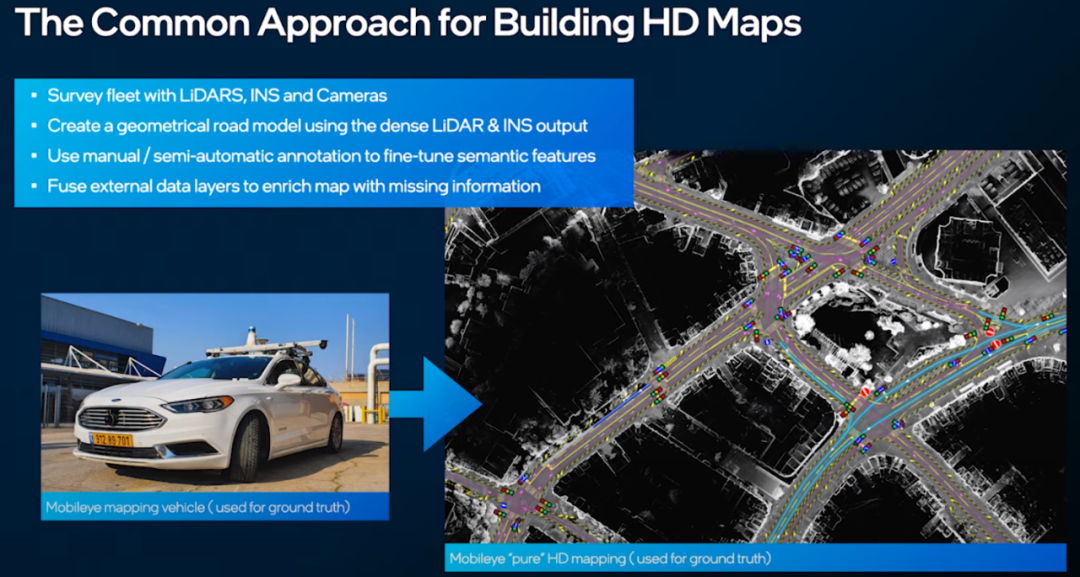
全局坐标系下厘米级精度不是必需的
AV车辆行驶过程中只关注周围几百米范围即可,所以只要这个范围内的足够准确即可。至于几公里之外的全局精度,Who Care...

语义层数据生产难以自动化
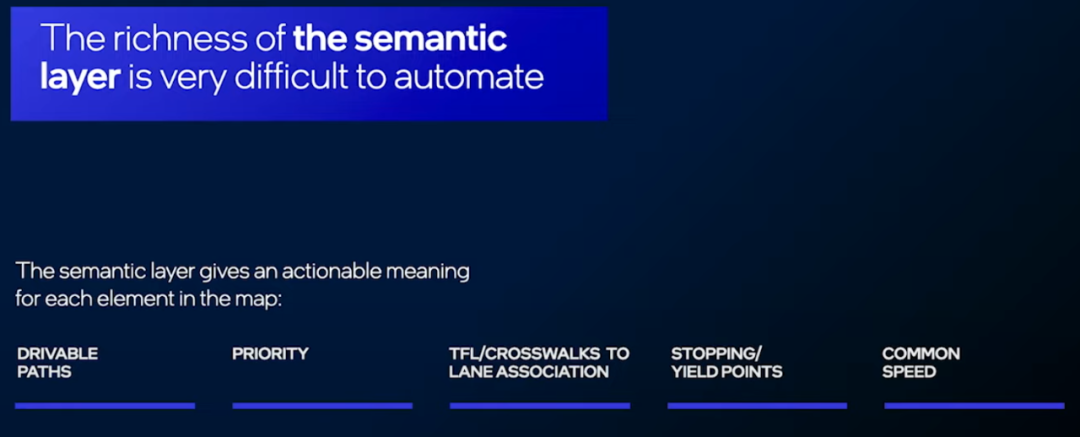
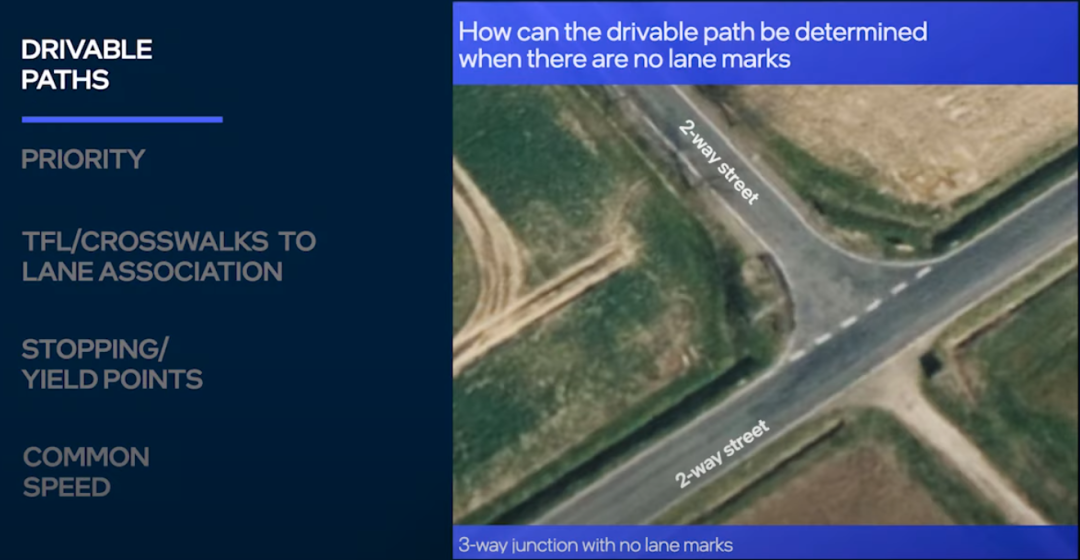
如下图所示,没有车道线的双向车道,单从图像观察,难以识别它的Drive Path。
如下图所示,转向规则千奇百怪:禁止红灯右转,完全停车后允许红灯右转,绿灯禁止左转,绿灯Yield后允许左转...

如下图所示,红绿灯异常复杂,识别车道、人行横道与红绿灯的关联关系难度很大...

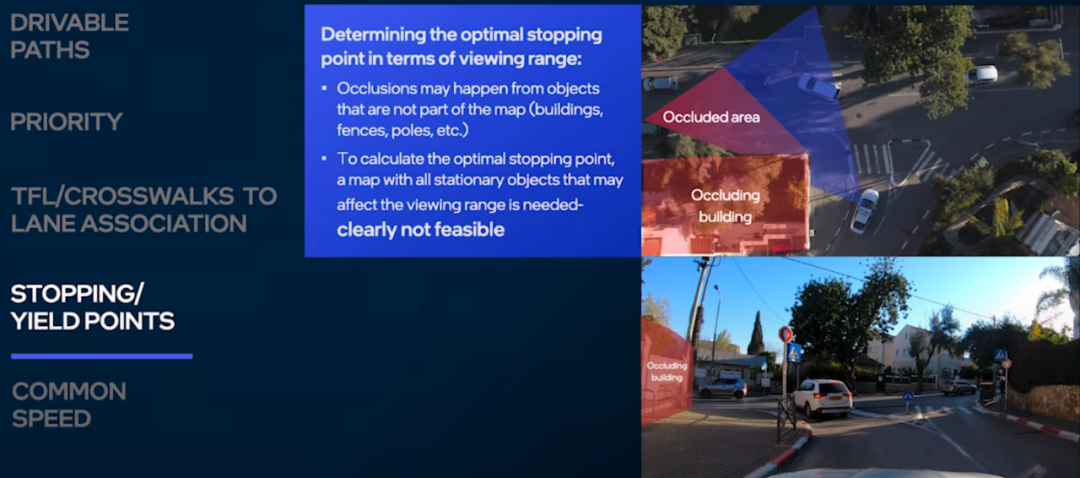
如下图所示,除非地图可以表达所有的3D要素,否则很难自动化的计算出车道的最优Stop/Yield Point。但是表达所有的3D信息对于地图来说又是不现实的...
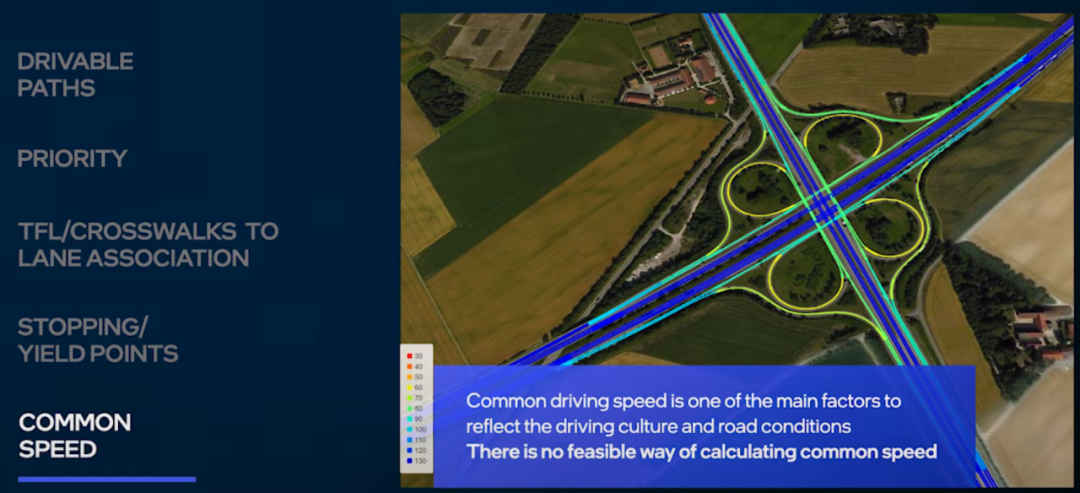
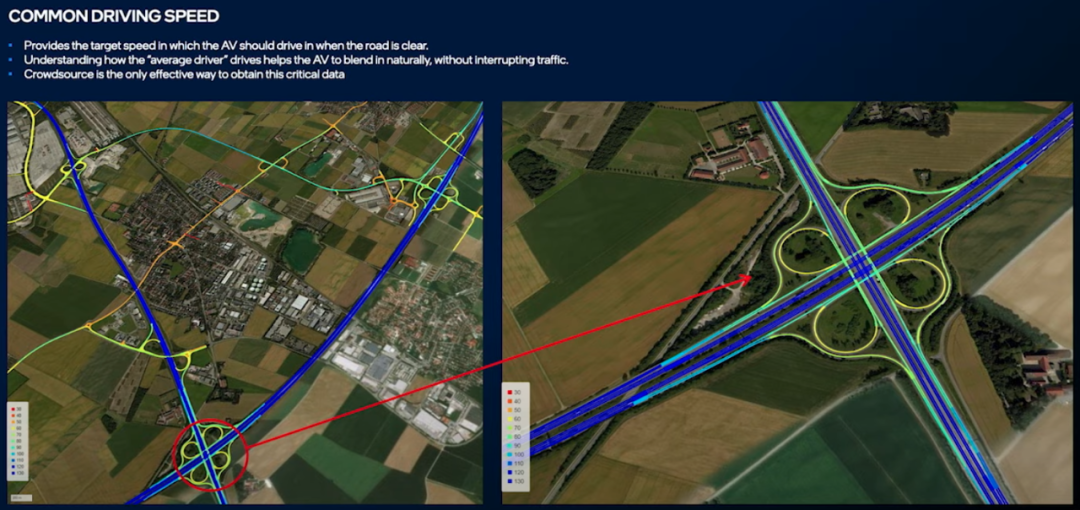
影响车辆行驶速度的因素有很多,道路几何、限速、文化等,难以量化,但它对Smooth Driving体验至关重要...
Mobileye如何解决这些问题
scalability依赖众包数据生成Millions Map Agents;Accuracy不是全局的Accuracy,而是局部的Accuracy,相对于道路上的静态元素位置。
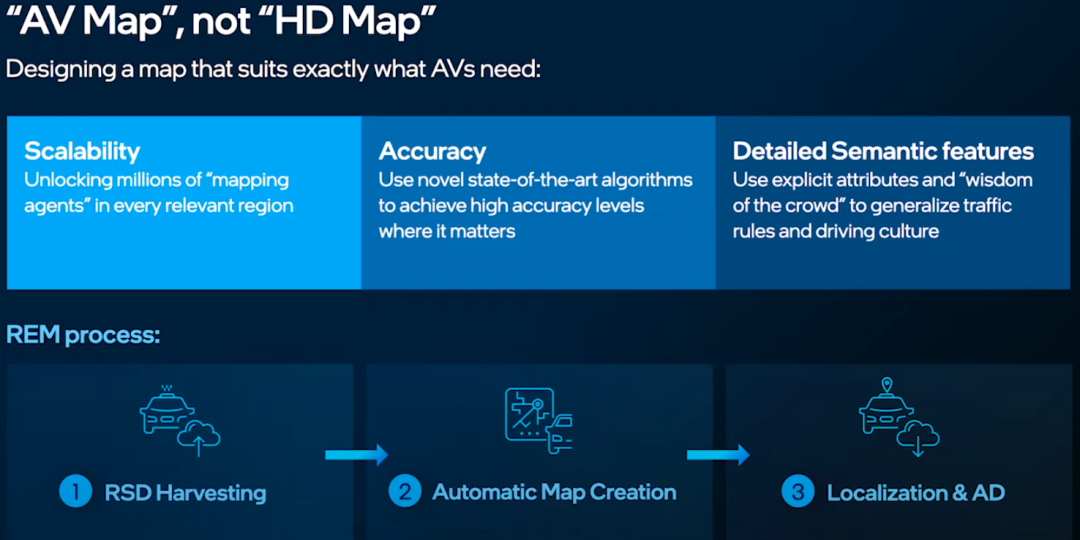
REM的处理流程如下,首先从成百上千辆车获取检测信息(没有使用差分GPS,而是使用了普通的GPS),这些数据传送到云端;每辆车Detection的角度不同,由于遮挡等原因,每辆车检测的landmark也有差异,将这些数据进行Alignment处理,生成高精度的地图数据;最后,Modeling And Semantics负责生成地图的语义数据。
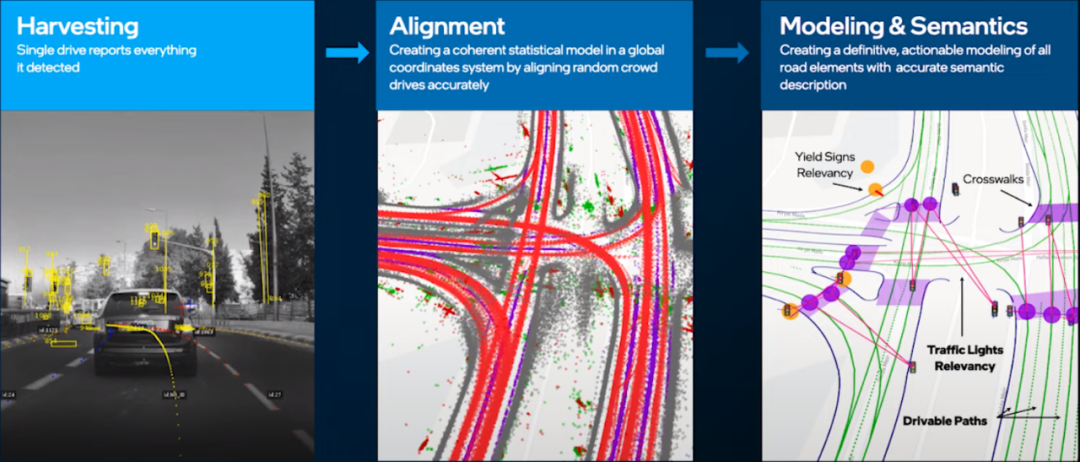
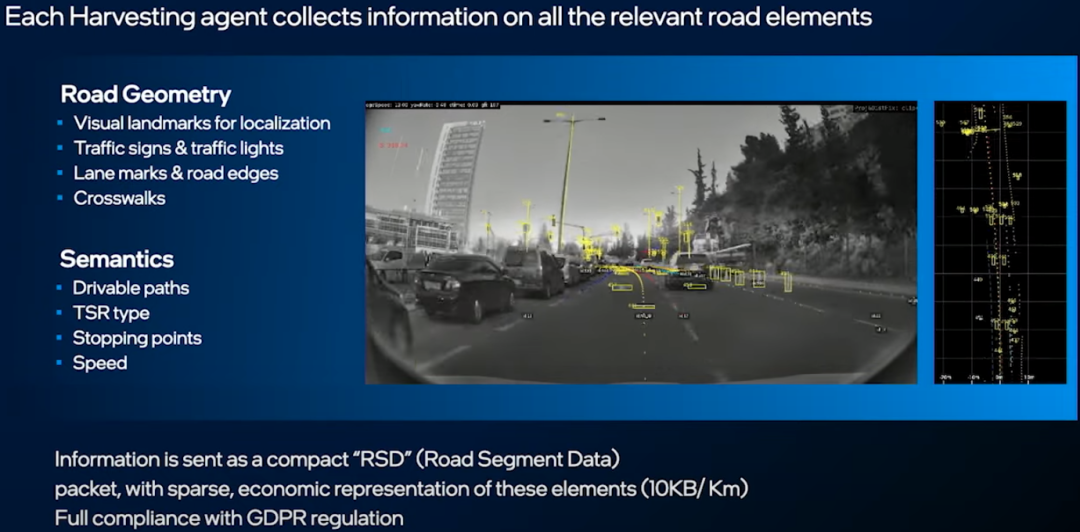
Harvesting
下图中黄色的框是车辆检测的landmarks和lane marks,同时车辆会尝试检测driving path等语义信息,一辆车可能检测不准确,但是成百上千的过路车辆会让检测结果越来越好。
Mobileye Harvesting的数据量为10K/公里,这些检测的数据会被发送到云端。
Aligning Drives
检测每个RSD中每个元素的6D Pose,然后对齐相同位置的元素,得到厘米度精度的driving path等信息。
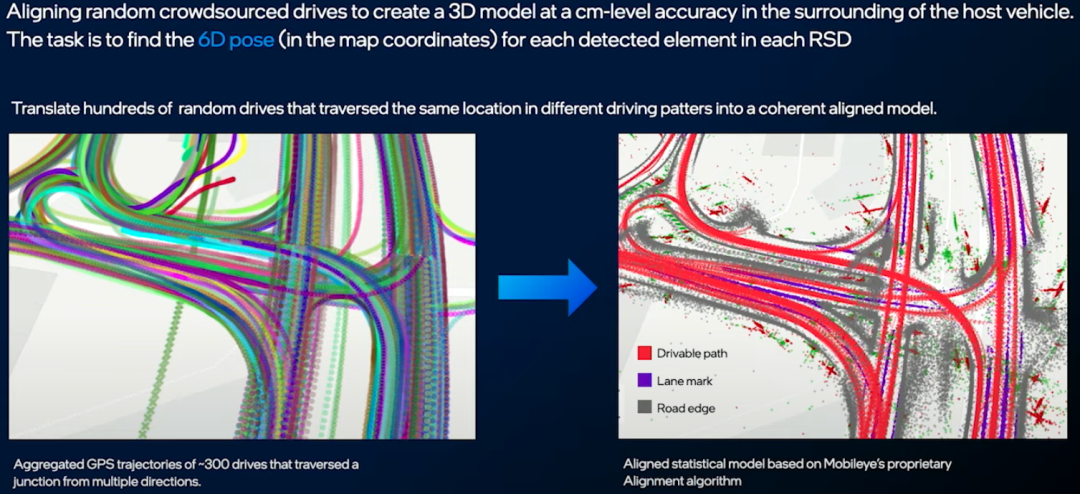
由于GPS存在误差,每个车辆检测的道路元素位置都存在噪声,所以只依靠简单的位置求均值是不可行的。
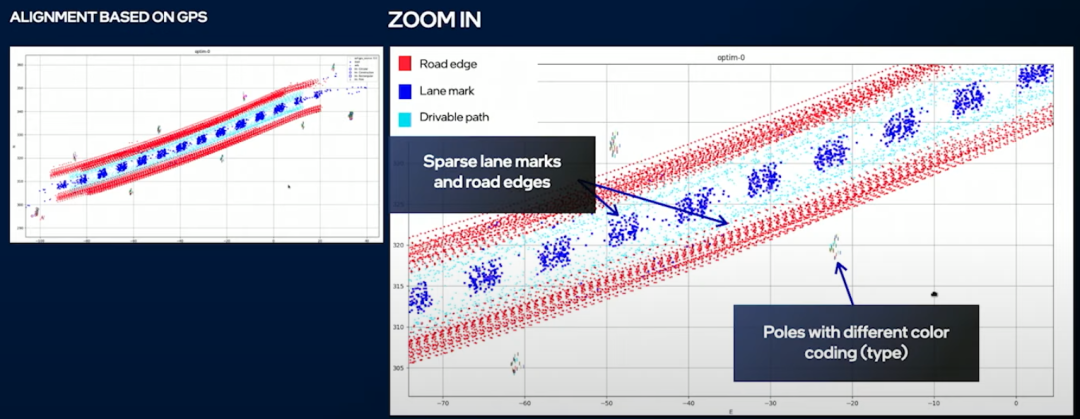
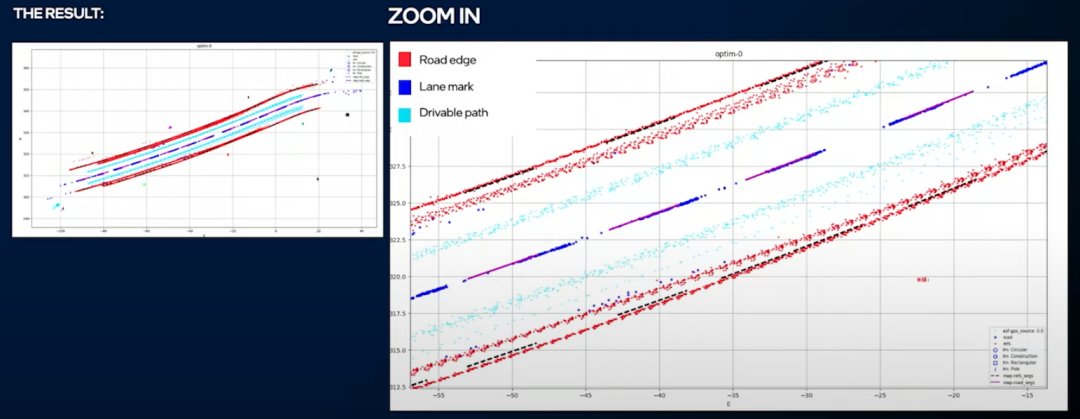
Align之后可以明显的看到两条Driving Path(蓝色)和两侧的道路边界(红色)。对齐的过程是靠几何运算进行。
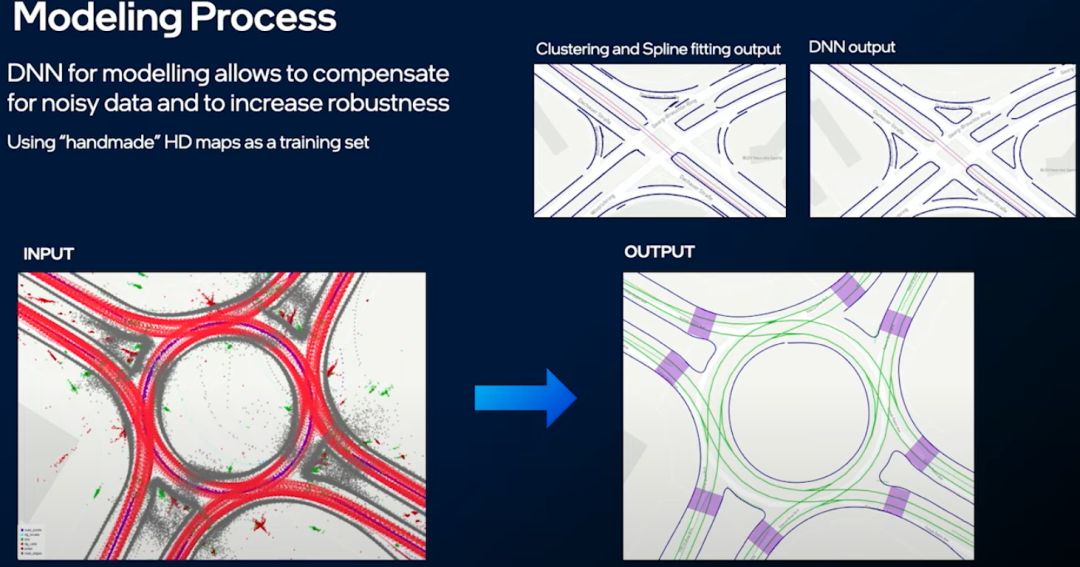
仅仅靠聚类(Clustering)和Spline Fiting得到下图右上角的结果,这个结果不是特别理想。后来通过神经网络生成高精度地图,效果好了很多。
为什么语义理解离不开众包
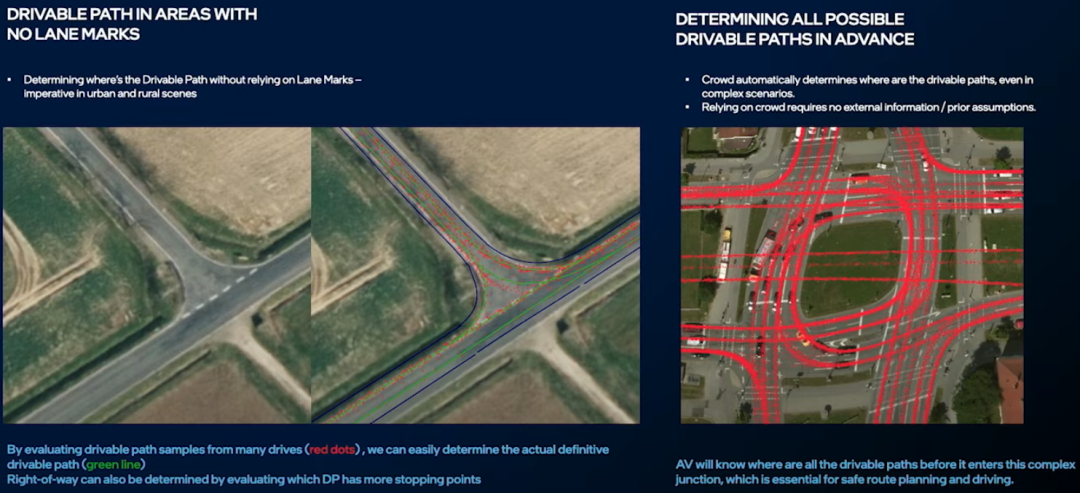
如下左图所示,通过众包数据可以在没有Lane Marking的道路上获取Driving Path。
如下右图所示,众包数据提供了复杂场景下的所有可通行路径。
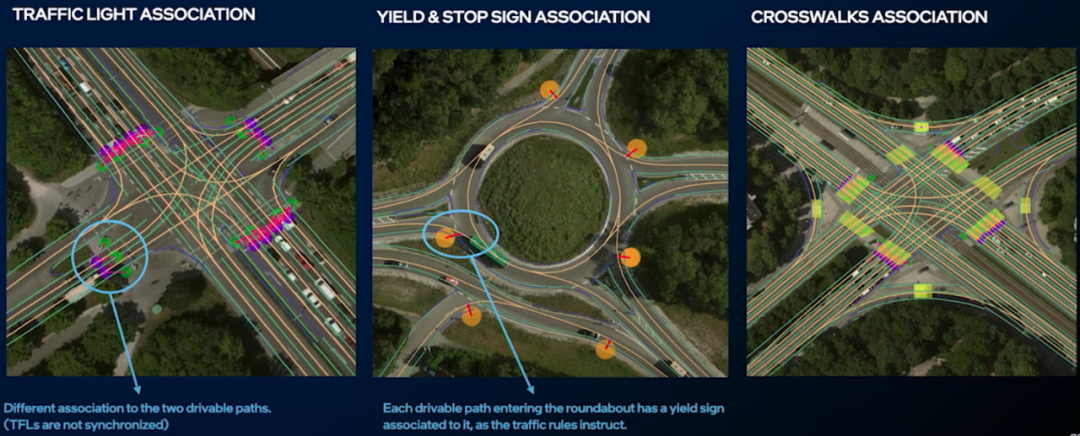
如下图所示,通过众包数据可以获得红绿灯与车道的关联关系、Yield Sign的Stop Point、Crosswalk与红绿灯的关联关系等。
如下左图所示,通过检测哪个Drive Path的Stop Point比较多,我们可以从众包数据中获取到没有Traffic Sign情况下各个道路的路权优先级。
如下中图所示,我们可以从众包数据学习到在路口其它司机的停车位置。
如下右图所示,从众包数据可以学习到,在无保护左转的场景下车辆的Stop Point。

众包数据是获得各个道路Common Speed的唯一高效的方法,Common Speed提供了当道路没有车辆时候AV车的目标行驶速度。采用这种方法可以使得无论在哪个国家、地区,或者不同的道路类型,AV车都可以自然的融入车流。
最后
到目前为止,Mobileye与超过6家汽车制造厂商合作,每天可以覆盖800万公里的路网更新。预计到2024年,每天覆盖的路网会达到10亿公里。




