参考:
Failed to build tree: parent link [base_link] of joint
在古月居gazebo 的基础教程里,运行古月居的mbot的launch文件报错,小机器人不出现。
主要原因是提供的xacro文件的宏定义没有放在xacro的命名空间。
解决:
将<mbot_base_gazebo>改为<xacro:mbot_base_gazebo>

Failed to build tree: parent link [base_link] of joint [lidar_joint] not found
news/2024/7/5 3:32:43
相关文章
Tomcat和Servlet学习记录
Tomcat和Servlet入门 1.Tomcat1.1什么是Tomcat1.2 目录结构1.3 IDEA中配置Tomcat 2.Servlet2.1 什么是Servlet2.2 使用Servlet获取参数2.3 Servlet生命周期2.4 Servlet.http.HttpServlet 3.Http协议4.Session 和Cookie4.1 Session4.2 Cookie 5.服务器端内部转发和客户端重定向6…

Mybatis-plus自定义模板生成代码
Mybatis-plus自定义模板生成代码
参考:
自定义ID生成器 | MyBatis-Plus
自定义属性注入到模板 - MyBatis Plus 教程
MyBatis Plus 代码生成器(最新版本:V3.5.3)使用指南 - 掘金
mybatis plus generator 3.5.1 从了解到自定义…

Go语言必知必会100问题-11 使用选项模式
使用选项模式
在设计API时,可能会遇到一个问题:如何处理可选配置?有效的解决可选配置问题可以提高API的灵活性。本文通过一个具体示例说明处理可选配置的一些方法。该示例的要求是设计一个对外提供创建HTTP服务器的库函数。函数定义如下&…
![[MYSQL数据库]--mysql的基础知识](https://img-blog.csdnimg.cn/direct/422eed8633604bb5bfd2efed0fa84fc5.png)
[MYSQL数据库]--mysql的基础知识
前言 作者:小蜗牛向前冲 名言:我可以接受失败,但我不能接受放弃 如果觉的博主的文章还不错的话,还请点赞,收藏,关注👀支持博主。如果发现有问题的地方欢迎❀大家在评论区指正 目录
一、数据库…

优思学院|质量工程师需要学习什么软件?
初入职质量工程师的朋友常常会问:质量工程师需要学习什么软件?在质量控制和管理的世界里,拥有强大的数据分析工具是走向成功的关键,因此,对于质量工程师来说,掌握正确的软件不仅能提升工作效率,…
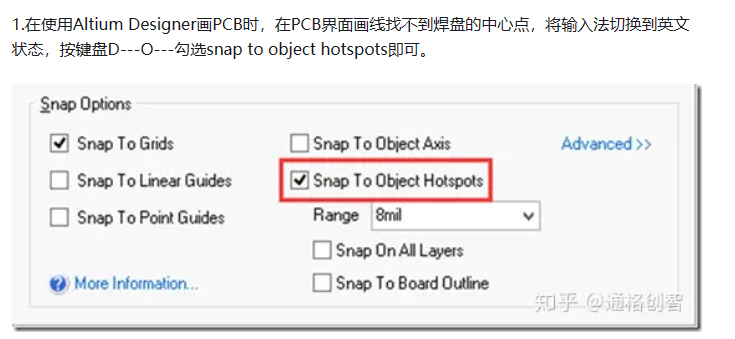
ad18学习笔记十六:如何放置精准焊盘到特定位置,捕抓功能的讲解
网上倒是一堆相关的指导
AD软件熟练度提升,如何设置板框捕捉?_哔哩哔哩_bilibili
关于Altium Designer 20 的捕抓功能的讲解_ad捕捉设置-CSDN博客
AD软件捕捉进阶实例,如何精确的放置布局元器件?_哔哩哔哩_bilibili
AD绘制PCB…
MySQLBackup备份数据库
环境:MySQL 8.0.36
1、安装部署
[rootnode5 ~]# wget -c https://edelivery.oracle.com/osdc/softwareDownload?fileNameV1040085-01.zip [rootnode5 ~]# ll total 22776 -rw-------. 1 root root 1066 Jan 21 14:59 anaconda-ks.cfg -r–r–r–. 1 root root 23…
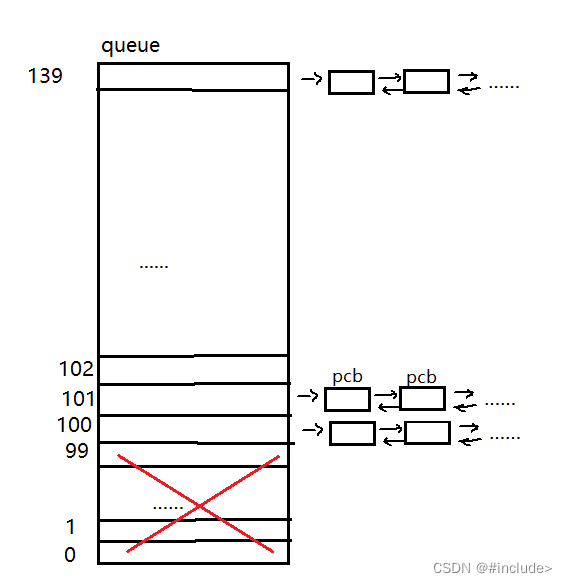
【Linux】进程优先级以及Linux内核进程调度队列的简要介绍
进程优先级 基本概念查看系统进程修改进程的优先级Linux2.6内核进程调度队列的简要介绍和进程优先级有关的概念进程切换 基本概念
为什么会存在进程优先级? 进程优先级用于确定在资源竞争的情况下,哪个进程将被操作系统调度为下一个运行的进程。进程…