光谱学是一种无创性技术,是研究组织、等离子体和材料的最强大工具之一。 本文介绍了如何使用市售的光学元件来实现透镜-光栅-透镜(LGL)光谱仪。进行光谱仪的设置,并对其设计进行改进和优化。(联系我们获取文章附件)
简介
本文介绍如何使用市售的光学元件实现透镜-光栅-透镜(LGL)光谱仪,以及如何在像差和性能方面对其进行优化。本文基于文章 "如何构建光谱仪——理论依据" 中所介绍的LGL光谱仪的基础知识。
LGL光谱仪的基本设计
在设计和实现光谱仪时,必须了解一些先决条件,并且确定出初步使用的有关光学元件和平台(文末提供了制造商网站的链接)。在本例中,我们研究了用于光学相干断层扫描(OCT)的光谱仪:
-
光谱仪的带宽为:855 nm到905 nm之间,以匹配对人眼检查有利的OCT光源的光谱。
-
我们使用的衍射光栅是由Wasatch Photonics公司生产的1800 l/mm的WP-HD1800/840-25.4相位体全息光栅。该光栅用于OCT应用设备,并在所需的波长范围内进行优化,使其获得最佳的性能。光栅的直径为 1英寸,此光栅也定义了系统的孔径。
-
因此,我们将使用Thorlabs生产的30mm笼型元件和1英寸镜头来实现光谱仪。
-
我们使用的传感器是Teledyne生产的 e2V AVIIVA EV71YEM4CL2010-BA9线相机,该相机有2048个10µm宽,20µm高的像素。
-
设置光谱仪的聚焦透镜的焦距为125mm,将几乎完全照亮传感器,中心波长的艾里斑半径为9.2µm,大约等于探测器的像素宽度(查看文章"如何构建光谱仪——理论依据",学习如何计算这些参数)。
在OpticStudio中设计LGL光谱仪
系统设置
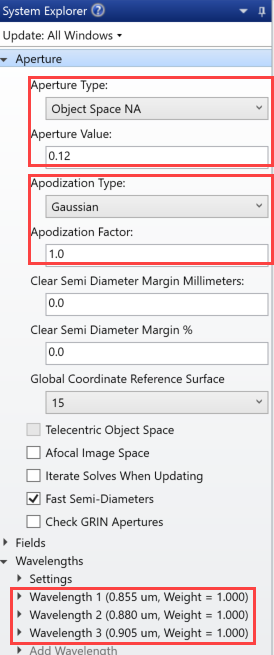
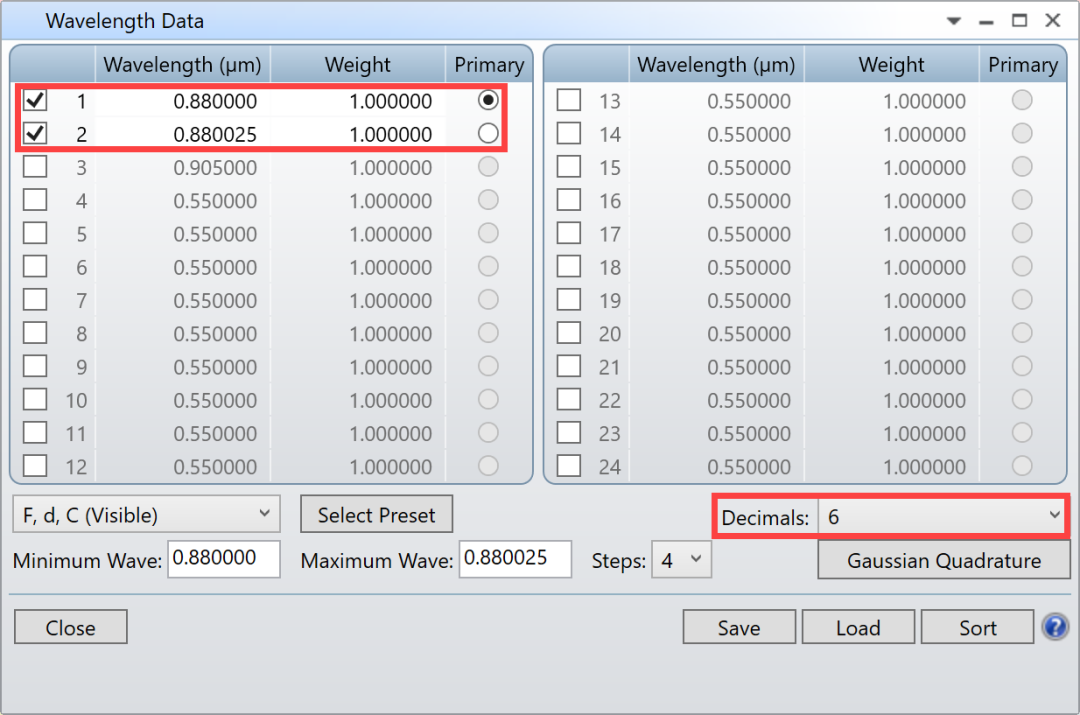
在本例中,假设进入光谱仪的光来自单模光纤。因此,可以将入射针孔作为点光源进行建模。因此,在系统选项(System Explorer)中,孔径类型(Aperture Type)设置为物方空间NA(Object Space NA),孔径值(Aperture Value)设置为0.12。此设置对应于光纤的接收角。此外,将高斯切趾因子设置为1.0,来达到光束的强度分布。将波长设置为0.855µm, 0.880µm (主波长)和0.905µm,以覆盖光谱仪所需的带宽。
准直透镜
OpticStudio提供了包含大量商用镜头的镜头库,可以通过镜头库(Lens Catalog)找到所需镜头并将其插入镜头文件:
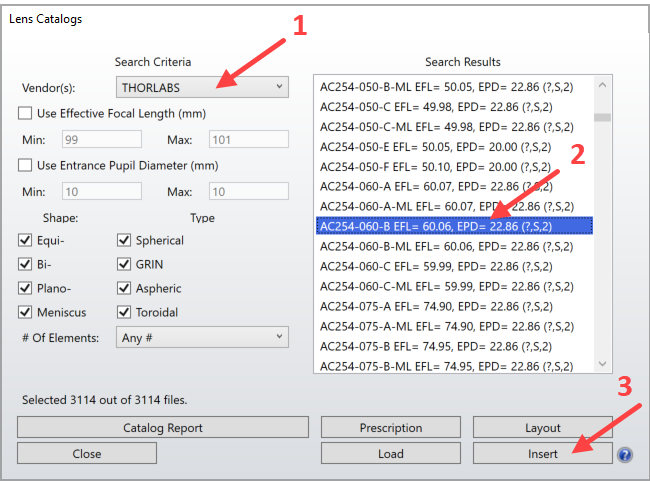
此处选择的镜头是直径为 1’’的Thorlabs消色差胶合透镜,有效焦距为60mm,膜层适合于所选的波长范围。选择焦距为60mm ,使准直光束的直径可以完全照亮衍射光栅。大孔径有利于在探测器上得到较小的衍射极限光斑尺寸。
将镜头插入到表面 1上,将在镜头文件中添加新的三行。制造商优化了镜头的无限共轭比,即无限远物体成像到焦平面上。但我们想要做相反的事情,即:使点光源(光纤)准直。因此,需要倒转镜头。通过在OpticStudio中标记要反转的行并按下翻转元件(Reverse Element)按钮来实现的:
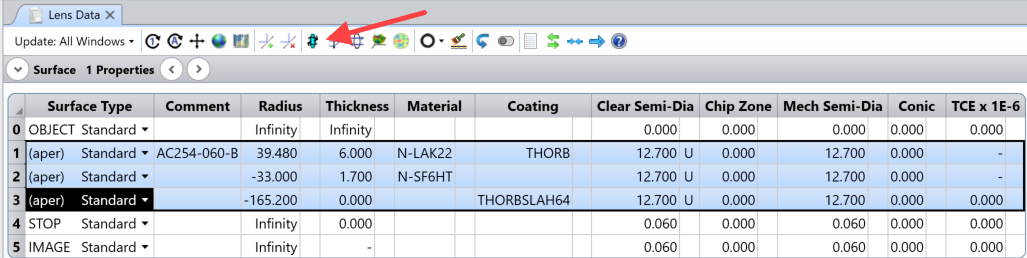
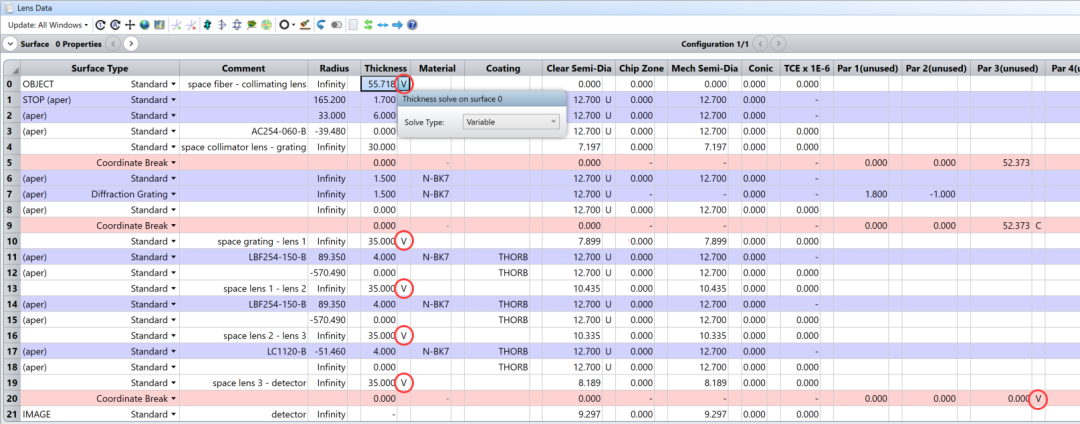
由于镜头的焦距是60mm,因此我们将表面0的厚度设置为60mm,以满足从光纤到准直透镜的距离。此外,还增加了准直透镜和衍射光栅之间的空间距离,由于光束是准直的,则此空间距离值为30mm并不重要。将表面1设为光阑:

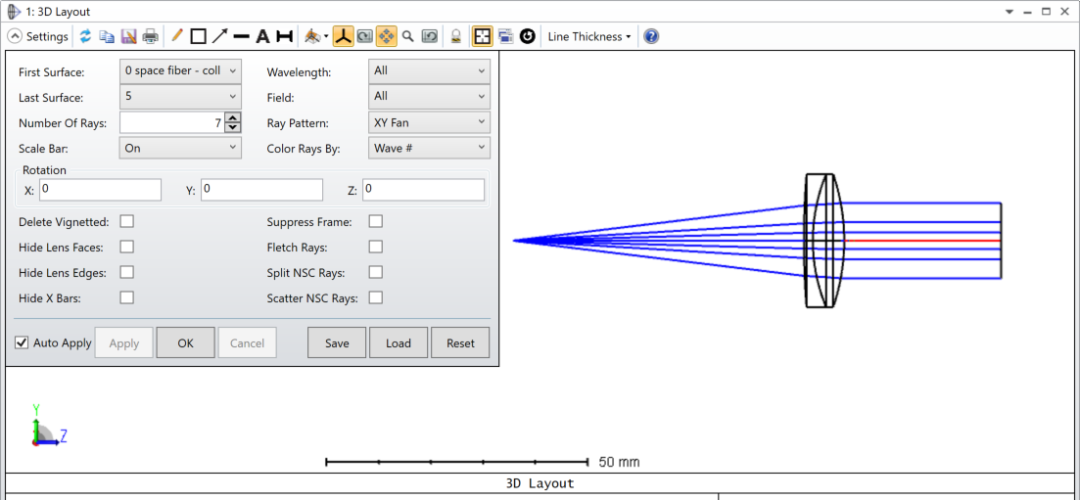
现在打开以上设置得到的三维布局图,你会注意到光线在镜头后没有准直。其原因是透镜还未处于相对于光纤的准确位置。OpticStudio的快速调整 ( Quick Adjust ) 功能 (通过点击:优化 ( Optimize ) > 快速调整 ( Quick Adjust ) 打开)是执行简单优化任务的非常方便的工具。选择如下参数,并调整两次:
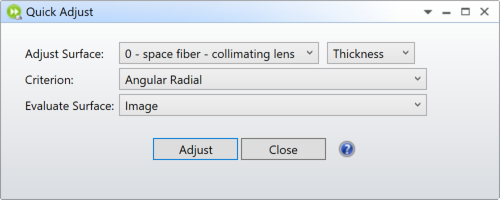
将表面0的厚度更改为55.718 mm(对应厂家指定的后焦距),检查三维布局图确认镜头准直后的光束:
衍射光栅
接下来,将衍射光栅插入系统。参考光栅规格,在镜头文件中输入以下行:

有关衍射光栅的详细信息以及如何在OpticStudio中实现,请参阅文章"如何构建光谱仪——理论依据"。
聚焦单元
正如前一段所提到的,聚焦单元是光谱仪中最精密的元件。我们用简单的方法开始设计,选择有效焦距为100mm的Thorlabs AC254-100-B透镜。这样做能够检查光学设计是否正确以及有什么像差。因此,将光栅与聚焦透镜之间的空间距离(60mm)、透镜和聚焦透镜与探测器之间的空间距离(97.1 mm,对应镜头的后焦距)添加到镜头文件中:

在三维布局图中,可以看到光束已经很好地聚焦在探测器上:
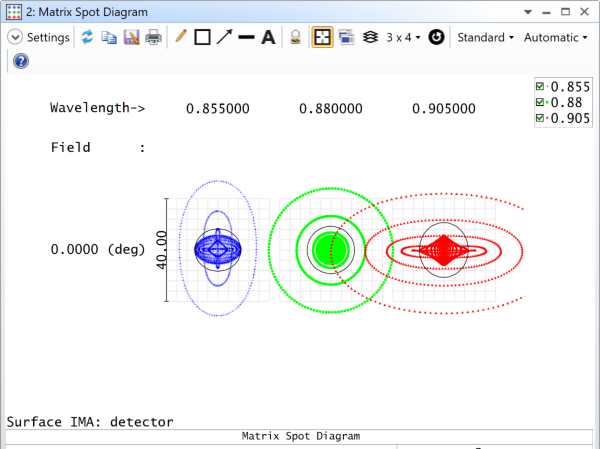
然而,查看矩阵点列图 ( Matrix Spot Diagram ) 发现:在中心波长(880 nm)处的光斑大小接近衍射极限(以黑色圆圈表示艾里斑),但在其他波长处还没有接近衍射极限。
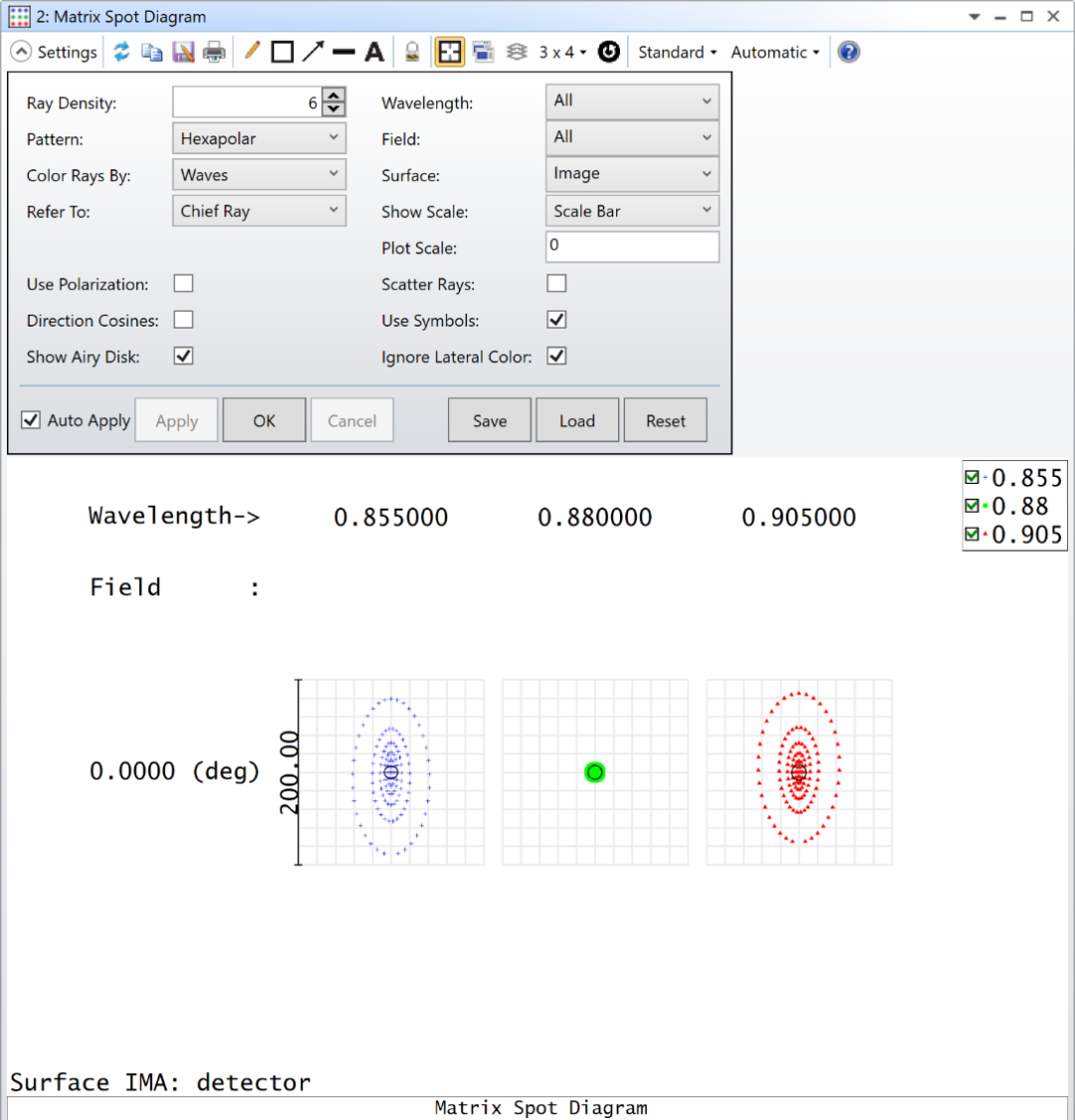
此处的像差与场曲有关,即边缘波长的光斑比中心波长的焦距短。有一些标准的策略可用来减少场曲。我们为光谱仪的聚焦单元确定了以下几个设计原则:
-
使用现成的镜片,因为它们比定制的镜片更便宜,出货速度更快。
-
用单透镜代替消色差双胶合透镜,因为单透镜比双胶合透镜便宜。我们不需要校正色差,因为光栅可以分色。将通过倾斜探测器来修正不同颜色产生的不同焦距。
-
使用最好的镜头。经过优化这种类型的透镜以聚焦准直光束。
-
我们不使用单个透镜,而是使用两个透镜分散光焦度。这种方法有两个好处:(1)由于透镜的表面曲率较低,像差减小。(2)在系统中增加了一个厚度,可以在优化过程中将其设为变量。
-
在聚焦透镜之后添加第三个发散透镜来减少场曲(平场镜)。
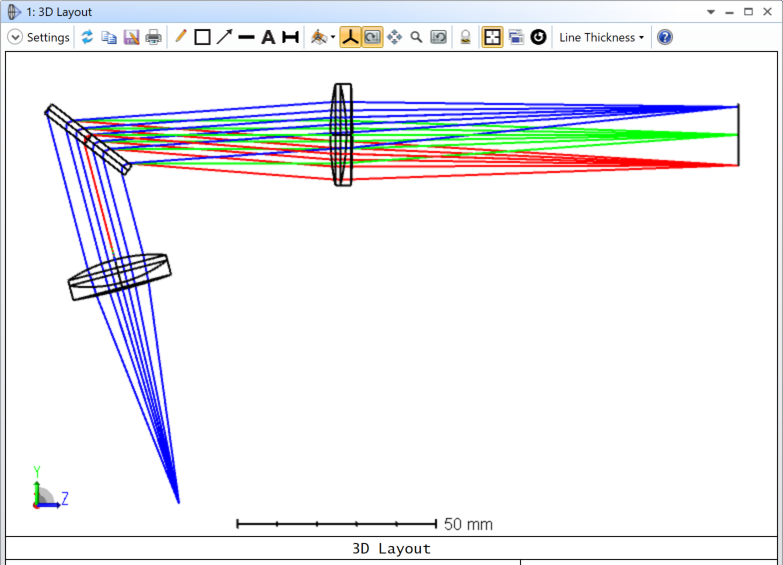
改进后的设计如下:

注意透镜之间的空间距离是任意选择的。选择焦距接近125mm的透镜,以照亮整个探测器。下一节将介绍如何有效地计算聚焦单元的焦距。
优化
在优化系统之前,需要确定哪些参数可以设置为变量。在本例中,将透镜之间的所有空间距离,以及光纤与准直透镜之间的空间距离设置为变量。此外,在探测器前面插入坐标断点,如前一节所述,使其可倾斜。这样就得到了最终的镜头文件:
一旦设置了变量,就可以开始优化系统。将分两个步骤来进行:首先使用OpticStudio的全局优化功能找到全局最优解,然后通过反复进行锤形优化来提高设计性能。
全局优化
优化过程中最关键的部分是评价函数,它需要与设计、优化目标和优化方法相匹配。下载附件中的评价函数MF_for_global_optimisation.MF,将其保存到Zemax\MeritFunction文件夹,并在OpticStudio的评价编辑器中打开它:
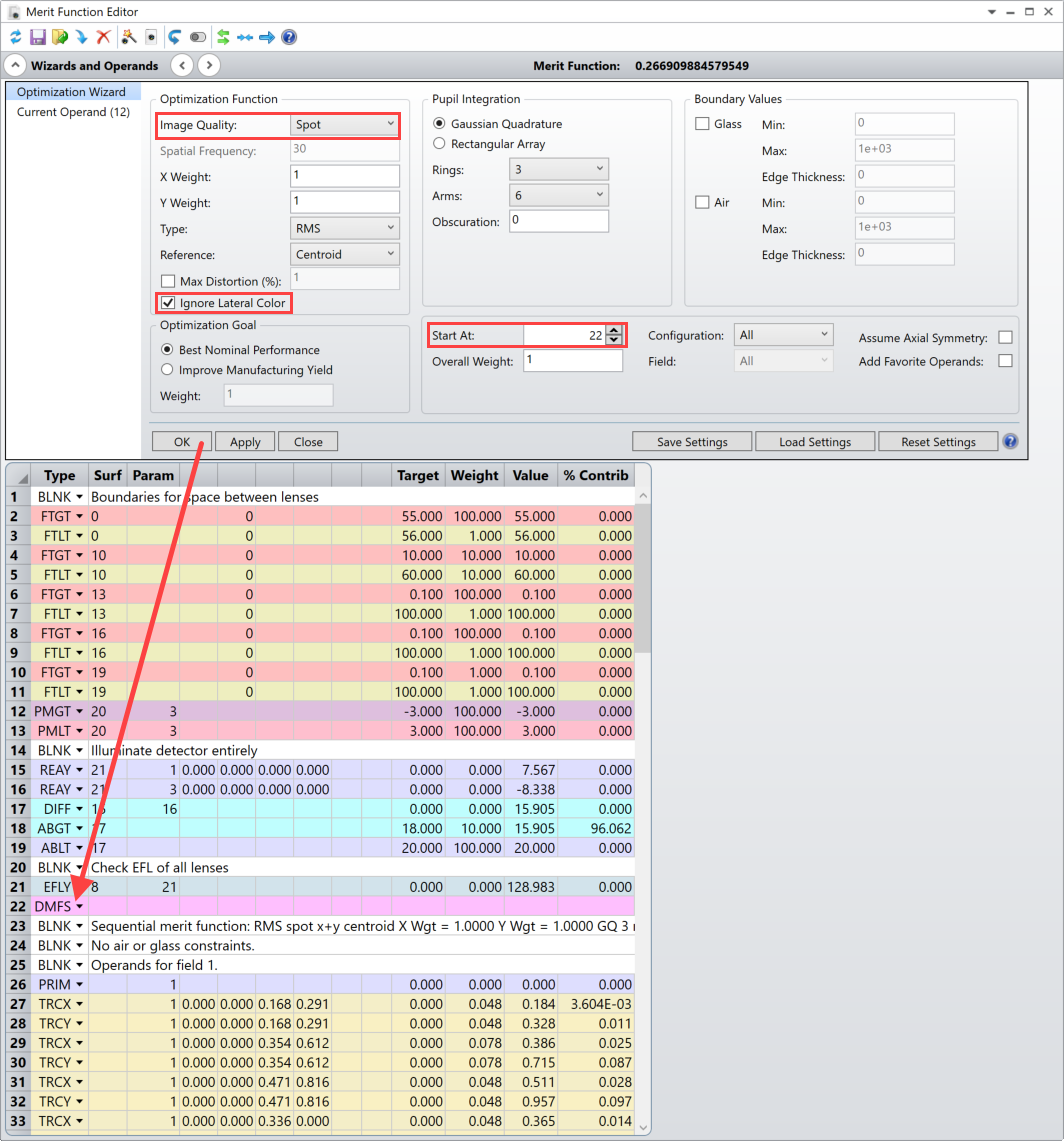
评价函数中的各行会产生如下效果:
-
第2至11行:定义透镜头之间空间距离的上边界 (FTLT) 和下边界 (FTGT),以及入射小孔的位置。选择操作数的权重,使透镜不能重叠(第6、8和10行),光纤的位置不会偏离(第2和3行)。引入光栅-透镜1空间距离的最大边界以避免边缘波长的光损失。
-
第12至13行:定义探测器倾斜角度的上边界(PMLT)和下边界(PMGT)。
-
第15至19行:计算 ( REAY, DIFF ) 并设置 ( ABGT, ABLT ) 探测器宽度的边界条件,设置权重使探测器不被过度照明。
-
第21行:计算聚焦单元的焦距。这个操作数不被用于优化过程(权重为0),只用于查看聚焦单元的焦距。
-
第22行及以下行:优化最小光斑尺寸。这些行是使用优化向导自动生成的,如上图所示。
点击优化 ( Optimize) > 全局优化 ( Global Search )打开全局优化窗口,并开始优化,只需几秒钟就可以找到系统的全局最优解:
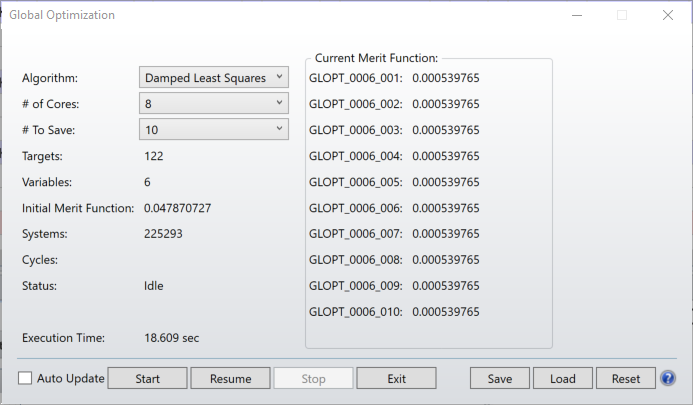
现在,三个波长的光斑大小都已经接近衍射极限:

锤形优化
下一步,也是最后一步,通过锤形优化得到最终的解。此时,需要对评价函数进行修改,因为现在已经达到了系统的衍射极限。我们将不再对光线进行优化,而是对衍射极限的圈入能量进行优化。通过删除评价函数中的第22行及以下行,并将它们替换为以下三个操作数来实现这个目标:

输入DENC操作数的相关参数,以使其分别参考三个波长的质心在y方向上优化得到最大能量。经过几分钟的锤形优化(通过点击:优化 ( Optimize ) > 全局优化 ( Global Optimizers ) > 锤形优化 ( Hammer Current ) 打开), OpticStudio将会找到在光线优化方面看起来更糟糕的解:
但是如果查看圈入能量分数(Fraction of Enclosed Energy)(通过点击:分析(Analyze)>像质分析(Image Quality)>圈入能量(Enclosed Energy)>衍射(Diffraction)打开),我们会发现已经接近系统的衍射极限了:
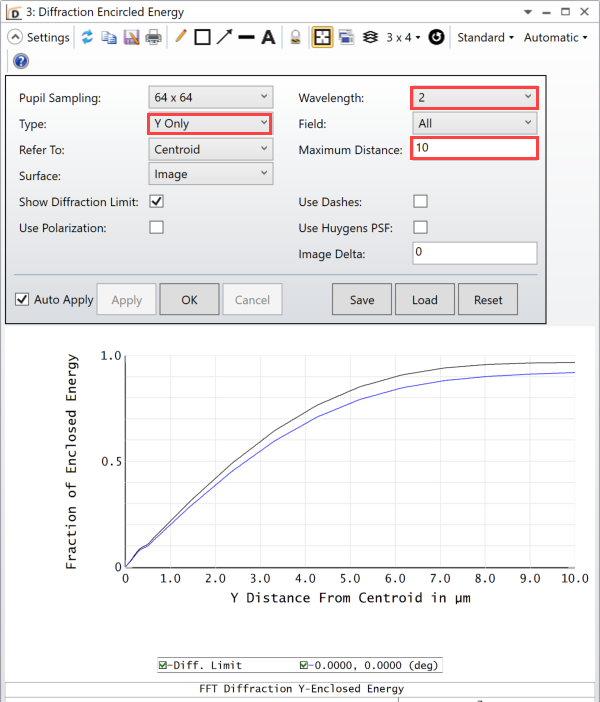
我们选用的探测器的像素宽度为10µm。因此,重要的是控制距离质心y方向上5µm内的圈入能量分数,可以看出:得到的结果仅比所能达到的衍射极限低百分之几。
可以将锤形优化运行更长时间,然后进行局部优化,以找到更好的结果,但目前所取得结果也是非常好的。衍射极限光斑尺寸约等于像素尺寸(像素尺寸为10µm,衍射极限光斑尺寸为9.3µm),探测器几乎被完全照亮(探测器尺寸为20.5毫米,照亮18.5毫米),圈入能量接近衍射极限。
光谱分辨率
文章"如何构建光谱仪——理论依据"中已经讨论了如何定义和计算光谱仪的分辨率。在这里,我们将讨论扩展到衍射和探测器作为线相机的像素大小所施加的限制。
衍射极限
瑞利判据指出,如果两个点源之间的距离不小于艾里斑半径(我们的情况是880 nm时的9.3 μm),则可以区分两个点源的图像。但是,在光谱仪中,我们不解对象平面中的点,而是解决波长。因此,在照明探测器宽度为18.5 mm时,我们可以在光谱仪中解决大约2000波长的问题。鉴于光谱仪(50 nm)的带宽,我们得到的衍射限量分辨率为25pm。
然后我们点击Analyze…Huygens PSF Cross Section。正如我们在显示的图中看到的,两个波长的点扩散函数(PSF)彼此相近,但它们仍可分别识别为0 μm和约-9 μm的两个峰:
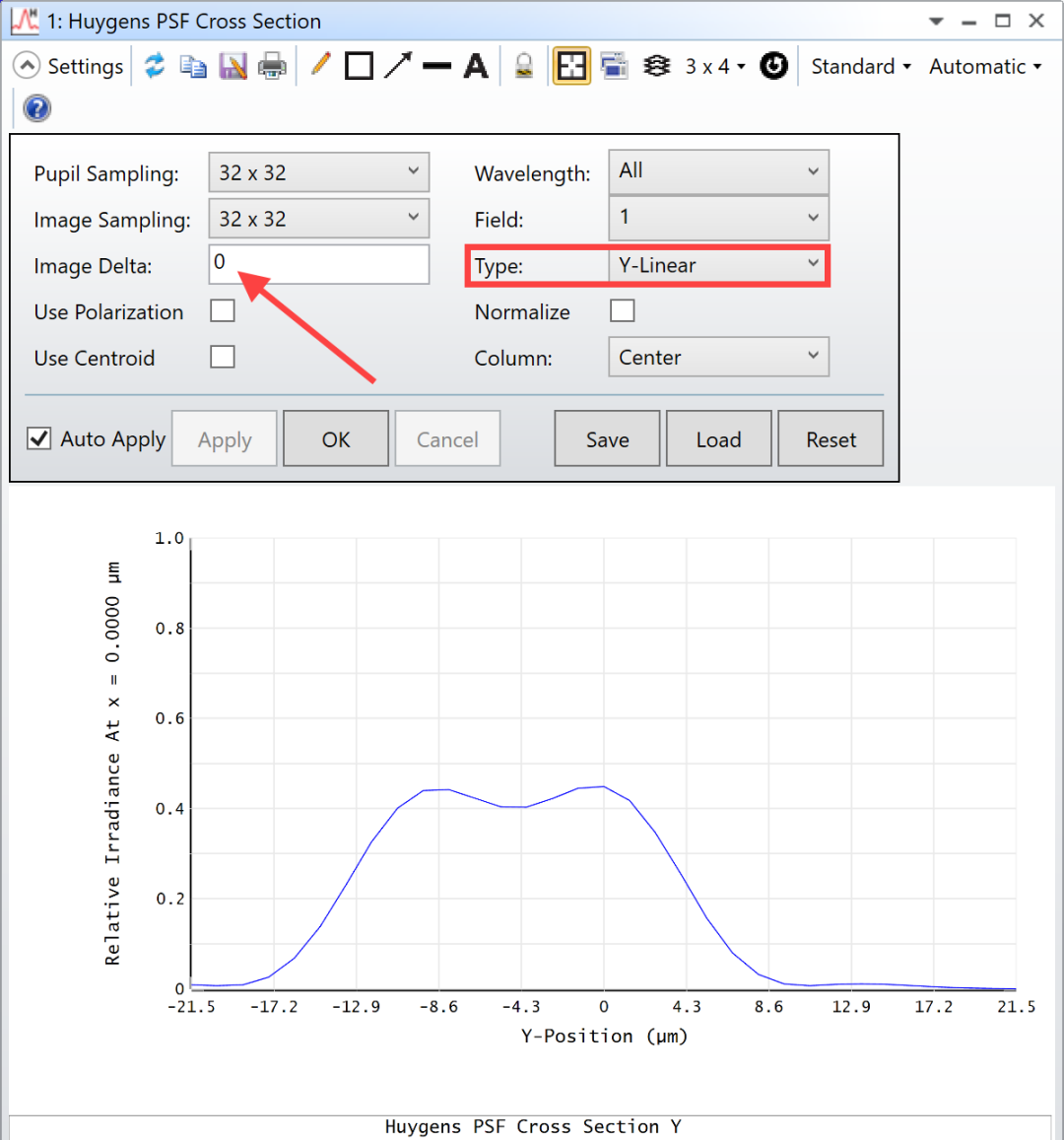
因此,通过此分析,我们可以确认光谱仪的衍射限分辨率为25 pm。
像素极限分辨率
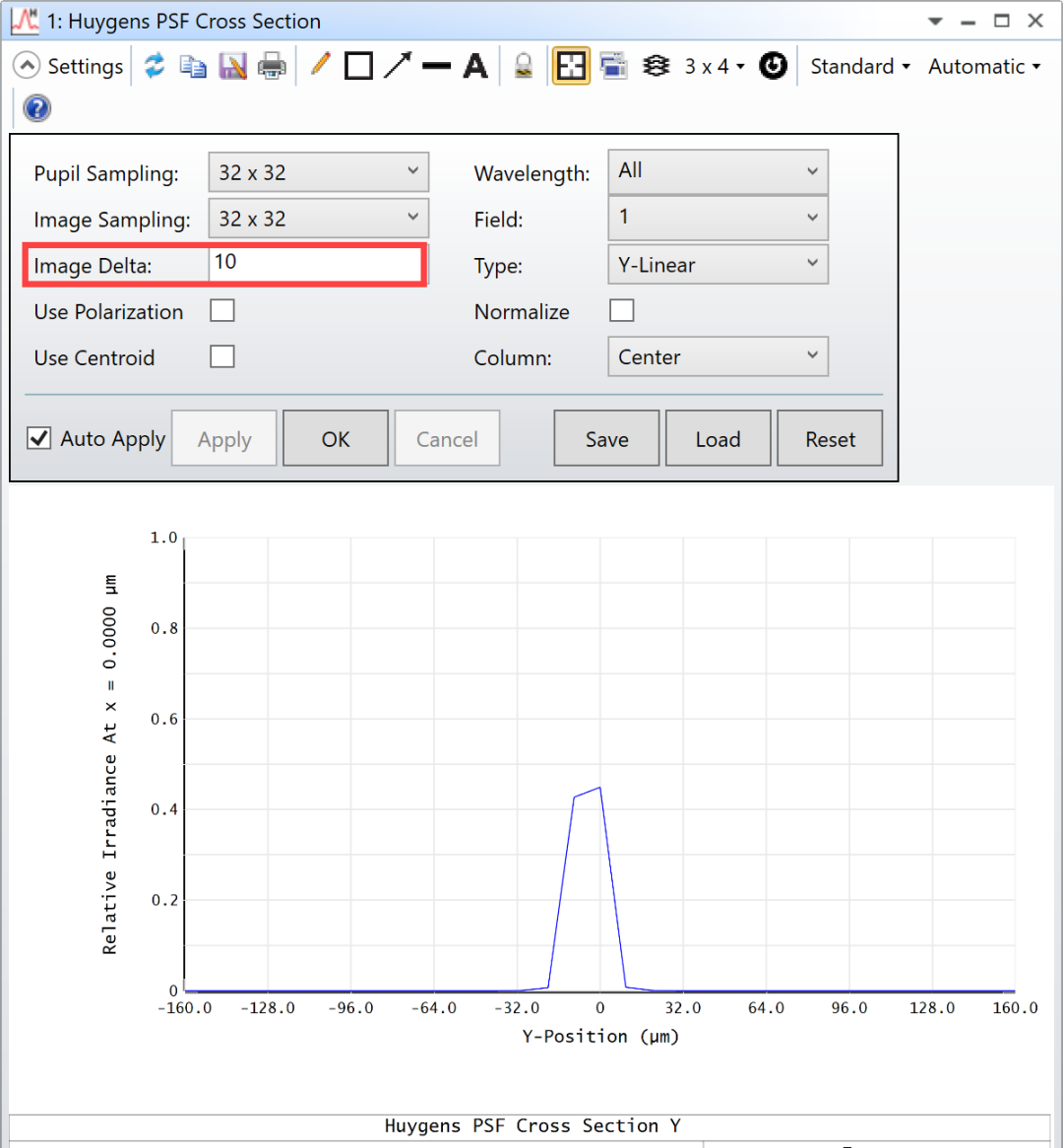
限制光谱仪分辨率的另一个因素是使用线相机采样频谱时的像素宽度。OpticStudio提供了一种非常方便的方法来检查惠更斯PSF横截面图中的此行为:将图像Delta设置为10将平均信号宽度超过10μm,即相机像素的宽度。正如你所看到的,两个峰值不再可区分:
在这里,还有另一个考量:奈奎斯特-香农采样定理表明,至少需要两个采样点来接受艾里斑半径。因此,要在线性阵列摄像机上接受两个PSF,其距离必须至少为20 μm(像素宽度为10 μm的两倍)。此距离反过来对应于50 pm的光谱分辨率。
您可以通过将第二个系统波长更改为 0.880050 μm 来验证此结果,并看到在惠更斯PSF横截面图中再次区分峰值。因此,我们可以得出结论,我们的光谱仪的像素有限分辨率是50 pm。
因此,最终,我们的光谱仪的分辨率受线性阵列相机像素大小的限制,而不是衍射极限。最好用另一台具有4000个5um宽像素的线性阵列相机,以充分采样衍射极限点。不幸的是,这样的相机是不存在的。另一种方法是允许在光谱仪中出现更大的衍射极限大小。但是探测器会被过量照明,我们会失去光谱仪的部分带宽。